


கடினத் தளம் மற்றும் தரைவிரிப்பு இரண்டிலும் அனைத்து வெற்றிடங்களையும் நாங்கள் சோதிக்கிறோம்.
ரோபோ வெற்றிடங்களை நாங்கள் எவ்வாறு சோதிக்கிறோம்
ரோபோ வெற்றிடங்களை மதிப்பிடுவதற்கான எங்கள் முறை நேரடியானது, ஆனால் கடினமானது. இரண்டு வகையான சோதனைகளை நாங்கள் நடத்துகிறோம். முதல் சோதனை கண்டுபிடிக்க வேண்டும் ஒரு ரோபோ தரையை எவ்வளவு நன்றாக மூடுகிறது சுத்தம் செய்யும் போது. குறிப்பிட்டுள்ளபடி தொழில்துறை தரமான சோதனை அறையை நாங்கள் கட்டியுள்ளோம் சர்வதேச மின் தொழில்நுட்ப ஆணையம் இந்த நோக்கத்திற்காக மட்டுமே. IEC என்பது வெற்றிட உற்பத்தியாளர்களுக்கான ரோபோ வெற்றிட சோதனை நடைமுறைகளை நிர்வகிப்பதற்கான ஒரு சர்வதேச தரநிலை அமைப்பாகும்.

எங்கள் ரோபோ வெற்றிட சோதனை அறைக்கு வணக்கம் சொல்லுங்கள். அதன் உள்ளே கொஞ்சம் வித்தியாசமாகத் தோன்றும் பொருள்கள் உள்ளன. நிஜ உலகில் ரோபோ சந்திக்கும் மரச்சாமான்கள் மற்றும் தடைகளை உருவகப்படுத்தும் வகையில் அவை வடிவமைக்கப்பட்டுள்ளன.
இந்த அறையின் உள்ளே, ரோபோ வாக் சுத்தம் செய்யும் போது வழிசெலுத்துவதற்காக சந்திக்கும் வழக்கமான தடைகளை உருவகப்படுத்த வடிவமைக்கப்பட்ட பொருட்கள் உள்ளன. இந்த தடைகளில் சுவர் விளிம்புகள், மேஜை மற்றும் நாற்காலி கால்கள், படுக்கைகள் மற்றும் பிற தளபாடங்கள் மற்றும் பல, மேலும் வெற்று ஓடுகள் மற்றும் கடினத் தளங்கள், அத்துடன் தரைவிரிப்பு ஆகியவை அடங்கும். ஒவ்வொரு வெற்றிட கிளீனரின் மேற்புறத்திலும் எல்இடி விளக்குகளை ஏற்றுகிறோம். விளக்குகளின் பரிமாணங்கள் நாம் சோதிக்கும் ஒவ்வொரு குறிப்பிட்ட ரோபோ வெற்றிடத்தின் அளவிடப்பட்ட முனை அகலத்திற்கு ஒத்திருக்கும்.
ரோபோக்கள் அறையை சுத்தம் செய்யும் போது நகரும் போது, ஒரு மேல்நிலை கேமரா குறைந்த வெளிச்சத்தில் முழு அறையின் நீண்ட-வெளிப்பாடு படத்தைப் பிடிக்கிறது. அந்த புகைப்படம் அதன் இயக்க நேரத்தில் ரோபோ பயணித்த சரியான பகுதிகளை (மற்றும் அதன் முனை நிலை) காட்டும் LED களால் உருவாக்கப்பட்ட ஒரு ஒளி பாதையைக் கொண்டிருக்கும். வெற்றிடம் தவறிய அல்லது சிக்கியிருக்கும் தரையின் பகுதிகளையும் நாம் பார்க்கலாம். எங்கள் சோதனைக் குழுவில் உள்ள அனைத்து ரோபோ வெற்றிடங்களின் வழிசெலுத்தல் முடிவுகளை கீழே உள்ள கேலரியில் பார்க்கலாம்.
இரண்டாவது வகை சோதனையானது, ஒரு வெற்றிடமானது தரையிலிருந்து எவ்வளவு இயற்பியல் குப்பைகளை எடுக்க முடியும் என்பதை வெளிப்படுத்துகிறது. சிறிய துகள் அளவிலான அழுக்குகளைப் பிரதிபலிக்க, விளையாட்டு மணல் மற்றும் இயற்கையை ரசித்தல் மணலின் கலவையைப் பயன்படுத்துகிறோம். பெரிய துகள் மண்ணுக்கு, சமைக்கப்படாத கருப்பு அரிசி தானியங்களைப் பயன்படுத்துகிறோம். ரோபோக்கள் மூன்று வகையான தரைவழிகளில் (குறைந்த-குவியல் கம்பளம், நடுத்தர-குவியல் கம்பளம் மற்றும் கடினமான வெற்றுத் தளங்கள்) நேராகக் கோடு முறையில் இயங்குகின்றன.

எங்களின் ரோபோ வெற்றிட சோதனை அமைப்பு மேலும்.
ஒவ்வொரு வெற்றிடத்தின் குறிப்பிட்ட முனை அகலத்தையும் நாங்கள் கட்டுப்படுத்துகிறோம். எங்கள் சோதனைத் தளங்களை அழுக்காக சரிசெய்யக்கூடிய கருவியை உருவாக்கினோம். ஒவ்வொரு ரோபோவிற்கும் முனை பரிமாணங்களுடன் பொருந்தக்கூடிய ஒரு துல்லியமான மண்ணின் ஒரு பகுதியை கீழே வைக்க இது உதவுகிறது. மண்ணின் நிறை சீரற்ற முறையில் தேர்ந்தெடுக்கப்படவில்லை. தரையிறங்கும் பொருள், குப்பைகளின் வகை மற்றும் ஒவ்வொரு வெற்றிடத்தின் முனை அகலம் ஆகியவற்றுடன் தொடர்புடைய விகிதாசார அளவை நாங்கள் அளவிடுகிறோம்.
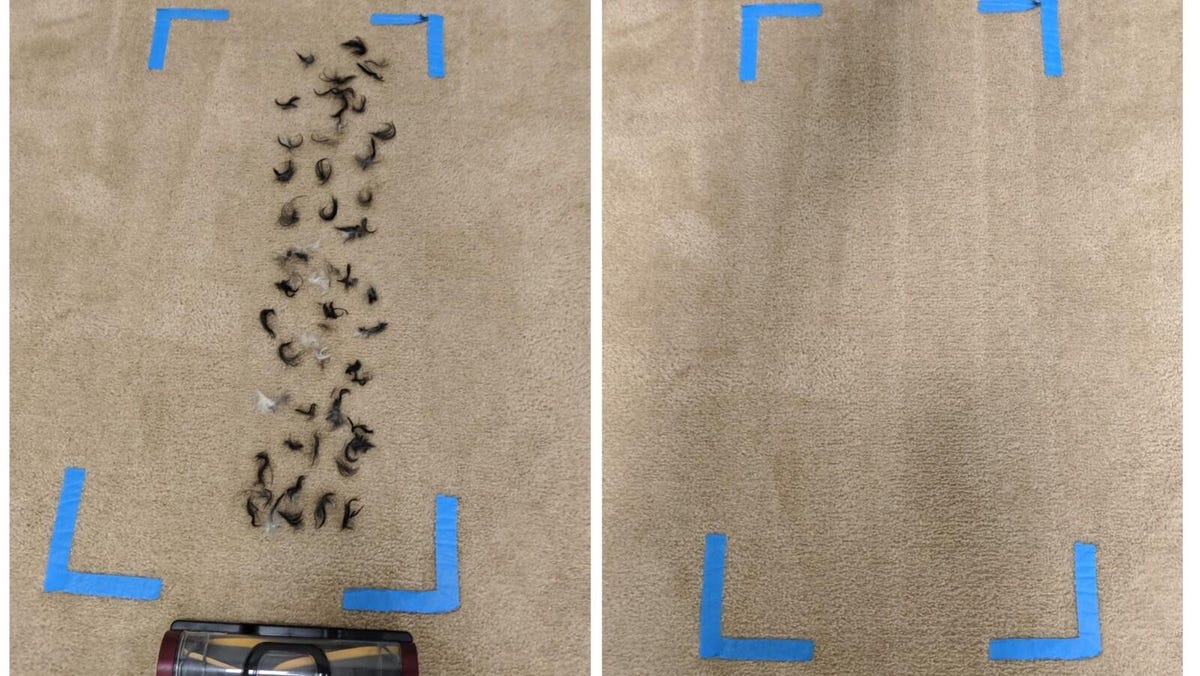
ஒவ்வொரு தரை வகையிலும் மூன்று துப்புரவு ஓட்டங்களை (குறைந்தபட்சம்) நடத்துகிறோம். நாங்கள் மணல் மற்றும் அரிசியை தனித்தனியாக சுத்தம் செய்யும் சோதனைகளையும் செய்கிறோம். இது ஒரு ரோபோ வாக்கிற்கு குறைந்தது 18 சோதனைகள் ஆகும். ஒவ்வொரு ஓட்டத்திற்கு முன்னும் பின்னும் ரோபோவின் குப்பைத் தொட்டியை எடைபோடுகிறோம். அங்கிருந்து ஒவ்வொரு துப்புரவு ஓட்டத்திற்கும் குப்பைகள் எடுக்கும் சதவீதத்தையும் ஒரு இயந்திரம் அகற்றும் சராசரி மண்ணின் அளவையும் கணக்கிடலாம். கூடுதலாக, ஒவ்வொரு ரோபோவிற்கும் மூன்று தள வகைகளிலும், நிகழ்வு (காட்சி) செல்லப்பிராணியின் முடி சோதனைகளை நடத்துகிறோம்.
எங்கள் அரிசி அடிப்படையிலான, நடுத்தர அளவிலான துகள் சோதனையானது ஒவ்வொரு துப்புரவாளர்களுக்கும் இடையே போதுமான வேறுபாட்டைக் காட்டவில்லை, அவை அனைத்தும் பெரிய துகள்களை சிரமமின்றி கையாள முடியும் என்று கூறுகிறது. செல்லப்பிராணிகளின் உரிமையாளர்களுக்கான உரோமங்களை அகற்றுவதற்கு, நாங்கள் முன்னறிவிப்பாக தீர்மானித்தோம்.
கம்பியில்லா வெற்றிடங்களை எவ்வாறு சோதிக்கிறோம்
நாங்கள் மூன்று தள வகைகளிலும் ஒரு நேர்கோட்டில் சோதனைகளை நடத்துகிறோம்.
கம்பியில்லா வெற்றிடங்களை அவற்றின் வேகத்தில் வைப்பது ஒரு ரோபோ வெற்றிட கிளீனரைச் சோதிப்பது போல் சிக்கலானது அல்ல, ஆனால் சிறந்த கம்பியில்லா வெற்றிடத்தைக் கண்டறிய இன்னும் நிறைய நேரம் மற்றும் கவனமாக முயற்சி எடுக்க வேண்டும். ஒவ்வொரு வெற்றிடத்தையும் மூன்று வெவ்வேறு பரப்புகளில் (கடின மரம், குறைந்த-குவியல் கம்பளம், நடுக் கம்பளம்) ஒரு நேர் கோட்டில் இயக்குகிறோம். மூன்று சோதனைப் படுக்கைகளிலும், சோதனைப் பகுதி ஒரே நீளம் (30.25 அங்குலம்) ஆகும்.

மணல் மற்றும் அரிசியை சுத்தம் செய்யும் வெற்றிடத்தின் திறனை நாங்கள் சோதித்தோம்.
ரோபோ சோதனைகளைப் போலவே, சோதனை படுக்கையின் அகலமும் வெற்றிடத்தின் முனை அகலத்திற்கு விகிதாசாரமாகும். இந்த அகலத்தை நாமே அளவிடுகிறோம். IEC வழிகாட்டுதல்களின்படி, ஒவ்வொரு சோதனைக்கும் மண்ணின் அடர்த்தியைக் கணக்கிட, முனை அகலம் மற்றும் தரை வகையையும் பயன்படுத்துகிறோம். அதே மண் வகைகளையே இங்கும் பயன்படுத்துகிறோம்; மணல், அரிசி மற்றும் செல்ல முடி. ஒவ்வொரு தரை வகையிலும் நாங்கள் மூன்று ரன்கள் (குறைந்தபட்சம்) செய்கிறோம். மணல் மற்றும் அரிசியை தனித்தனியாக உறிஞ்சும் சக்தியையும் சோதிக்கிறோம். இது ஒரு வெற்றிடத்திற்கு குறைந்தது 18 சோதனைகள் ஆகும். ஒவ்வொரு ஓட்டத்திற்கும் முன்னும் பின்னும் வெற்றிடத்தின் டஸ்ட் பினை எடைபோடுகிறோம்.
அங்கிருந்து ஒவ்வொரு ஓட்டத்திற்கும் அழுக்கு மற்றும் குப்பைகள் எடுக்கும் சதவீதத்தையும், வெற்றிடத்தால் அகற்றும் சராசரி மண்ணின் அளவையும் கணக்கிடலாம். கூடுதலாக, சிறந்த கம்பியில்லா வெற்றிடத்தைத் தேர்ந்தெடுப்பதற்கு உதவும் வகையில், ஒவ்வொரு வெற்றிடத்திற்கும், மூன்று தள வகைகளிலும், அனெக்டோட்டல் (காட்சி) செல்லப்பிள்ளை முடி சோதனைகளை நடத்துகிறோம்.











{kind=link}